回路
回路班はモーターやバッテリー、各機器を繋ぐ配線、プリント基板の作成などドローンの電気に関わる部分を担当しています!
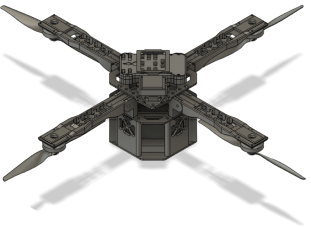
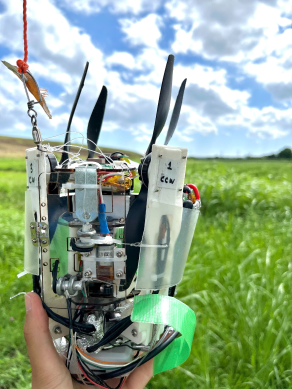
Cansatに使うドローンは重さや大きさの制約が多いため、電池は軽くて容量の大きいリポバッテリー、プロペラを回すモータは小型でも大きな回転数が得られるもの選定しました。
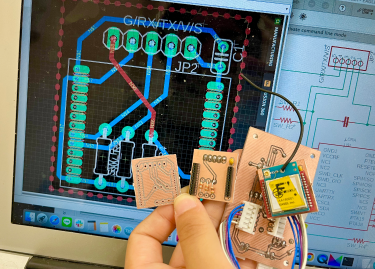
光センサ、測距センサなどの各センサやマイコンといった、必要な電子機器の実装・接続も回路の重要な仕事です。離れた機器同士は、圧着によって作成したコードを配線して繋げます。近くにある機器同士はプリント基板を印刷し、そこに各機器をはんだ付けすることで回路を組みます。プリント基板とは、パソコン上で機器の配線や配置を決め、基板加工機を使って銅板を削って作る基板です。
ドローンの展開、飛行には安定した電気系が不可欠です。細かい作業が多いですが、軽くて小さくかつ信頼性の高い回路を目指し、試行錯誤しながら開発を進めました。

制御
機体の制御にはフライトコントローラーであるPixhawkとコンパニオンコンピューターのraspberry pi zero2Wを用いています。機体の姿勢角推定や姿勢安定化、位置制御などはオープンソースのマルチコプター制御用ファームウェアであるpx4で行っています。そうした内部の制御をしてくれるpixhawkに対して、raspberry piは、どこに行ってほしいのか、いつ飛行を開始するのかを指示する司令塔の役割を果たしています。これによってpx4のみでは実現できない複雑な飛行シーケンスを可能としています。
また、raspberry piは光センサの値を読み取って機体が展開したか否かを検知し飛行開始の命令を送ったり、遠距離無線通信を可能とするLoRAモジュールと接続して現在の機体の位置情報を地上に送信したりといった役割も果たしています。
内部の制御はpx4に任せる形となるためそのブラックボックスの中身を理解することに大変苦しんだほか、確実にパラシュートから分離して飛行を開始するためのアルゴリズムや効率的な試験飛行を実現するためのツール(実機を用いず動作確認をするためのsoftware in the loopシミュレータやSSH接続しながらの開発を効率化するtmux等)の導入などを工夫しました。